Mit dieser Aktivität können Sie entdecken, wieviel Sie auf dem Mond und den verschiedenen Planeten des Sonnensystems wiegen. Um dieses Ziel zu erreichen, benutzen wir Arduino UNO, eine Hardware-Plattform zur Entiwcklung von Robotik-, Eletkronik- und Automatisierungs-Projekten, auf die eine Software (in C Sprache) geladen wird, mit der eine Reihe von Sensoren gesteuert werden können, die mit der Karte selbst verbunden sind, und die Interaktion mit Ihnen ermöglicht. Zusätzlich zur Arduino-Karte, brauchen wir 9 Knöpfen, einen für jeden Planeten des Sonnensystems, plus den Mond; einen quadratischen Podesten von etwa 40 cm Seitenlänge, der als Basis für unsere Waage dienen wird (Ideal wäre eine Holzplatte, die unseren Gewicht standhält), 4 Kraftzelle, mit 50 kg Tragkraft (so können wir ein Maximalgewicht von 200 kg messen); schließlich das Modul HX711, entscheidend zum Verstärken und Senden des elektrischen Signals auf die Arduino-Karte, das von den Ladezellen ausgeht.
Beginnen wir mit der Konstruktion der Waagschale. Erstens, nehmen wir unseren Podest und kleben die Ladezellen auf die 4 Seiten. Für diese Operation können wir etwas Heissleim verwenden, der – passen Sie auf – nur am aüsseren Sensorrand anzubringen ist, weil die Gewichtsensoren die Schwankungen des elektrischen Widerstands benutzen. Bestimmte Werkstoffe können zwar bei Druckbelastung oder Zugkraft Schwankungen auftreten. Das Hertz, die Sensor-Hertzen sind die Extensimeter die, auf die Kraftzelle so positioniert sind, dass sie genügend Hinweis zum Spannungsmessung geben. Der elektrische Thermometer mit Widerstand besteht aus einem sehr dünnen Drahtgitter, das auf einem Kunststoffträger starr befestigt ist. Der Dehnungsmeßstreifen wird verwendet, indem er auf die Körperoberfläche geklebt ist, zur Messung der Verformungen. Der Faden verfolgt den Verformungen der Oberfläche an der er geklebt ist: er dehnt sich und verkürzt sich damit; diese Großenunterschiede bewirken eine Änderung des Elektrikwiderstands des Pfadens. Durch Messung dieser Änderungen, kann das Ausmaß der Verformung, die sie verursacht hat, zurückvervolgt werden. Die Widerstandveränderungen werden vom Modul HX711 interpretiert; hierdurch erhält Arduino genaue Informationen über das Gewicht dem die Zellen ausgesetzt sind. Damit das Modul die Gewichtsänderung richtig erfassen kann, und der Arduino-Karte übermitteln, verbinden Sie die Kraftzellen entsprechend der unten stehenden Anordnung.
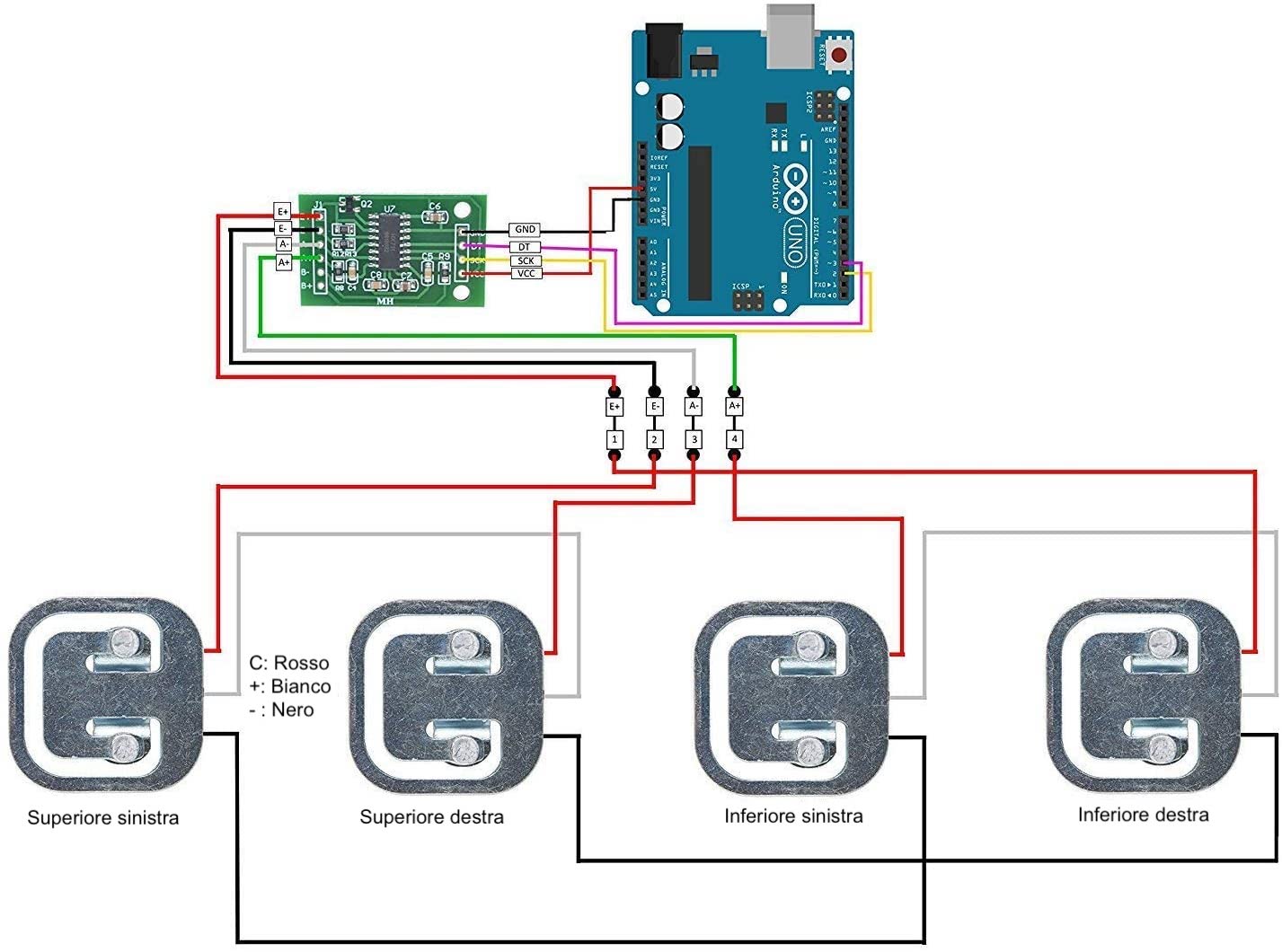
Verbindungen zwischen Kraftzelle und HX711 Modul: Obere linke Kraftmessdose: Roter Draht —> E Ausgang- Sensor HX711; Weisser Draht —> weisser Draht obere rechte Kraftmessdose; Schwarzer Draht —> schwarzer Draht untere linke Kraftmessdose. Obere rechte Kraftmessdose: Roter Draht —> A Ausgang- Sensor HX711; Weisser Draht —> weisser Draht obere rechte Kraftmessdose; Schwarzer Draht —> schwarzer Draht untere rechte Kraftmessdose. Untere linke Kraftmessdose: Roter Draht —> A Ausgang + Sensor HX711; Weisser Draht —> weisser Draht untere rechte Kraftmessdose; Schwarzer Draht —> schwarzer Draht obere linke Kraftmessdose. Untere rechte Kraftmessdose: Roter Draht —> E Ausgang + Sensor HX711; Weisser Draht —> weisser Draht untere linke Kraftmessdose; Schwarzer Draht —> schwarzer Draht obere rechte Kraftmessdose. Verbindungen zwischen HX711 Modul und Arduino: GND HX711 Modul —> GND Arduino; VCC HX711 Modul —> 5v Arduino; CLK HX711 Modul —> pin 2 Arduino; DOUT HX711 Modul —> pin 3 Arduino. Wie aus dem Diagramm ersichtlich, sind einige Drahte der Kraftmessdosen mit einander verbunden, um die sogenannte Wheatstone Brücke zu bilden. Diese Anordnung ermöglicht es, die Lasten gleichzeitig auf alle verschiedene Frachtzellensensoren zu kombinieren und zu messen. Wenn diese Verknüpfungen hergestellet sind, konzentrieren wir nun auf die 9 Knöpfe, die die Planeten des Sonnensystems repräsentieren, plus den Mond. Sie müssen so verbunden und programmiert werden dass – wenn sie gedrückt werden – auf dem Arduino-Serienmonitor, das Gewicht geben, das Ich auf einen bestimmten Planet haben könnte. Die Arduino Knöpfe werden mit einem Pin am Ground verbunden, während wir den zweiten Pin mit einem der digitalen Arduino-Kartenausgänge verbinden. Unten finden Sie das Verbindungsmuster.

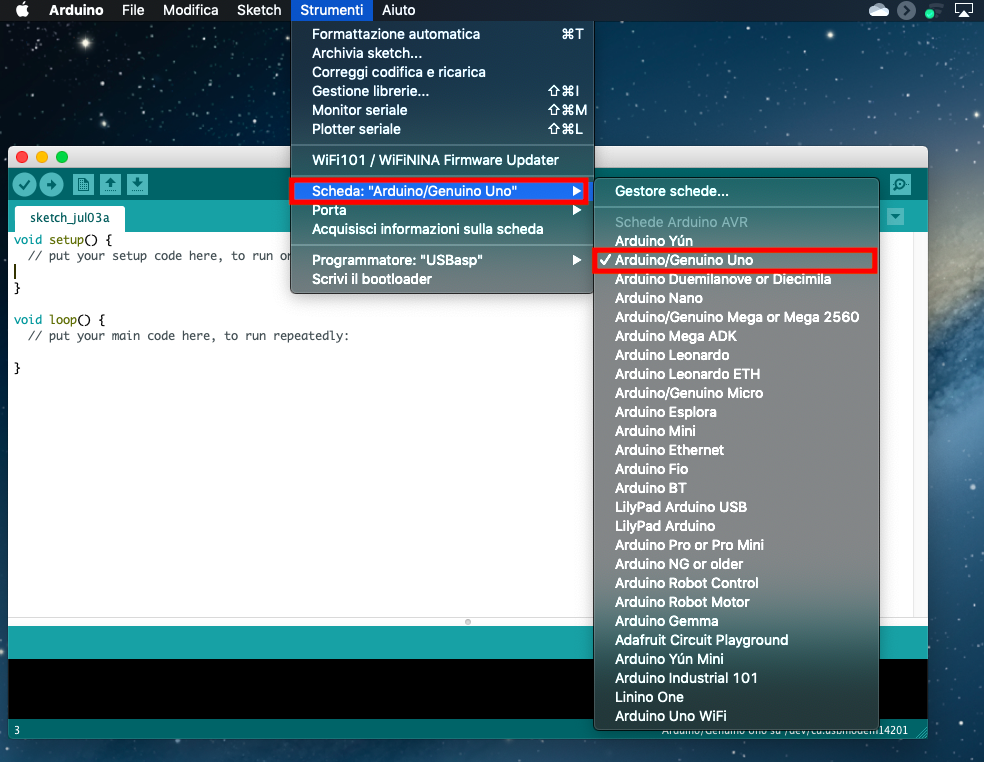
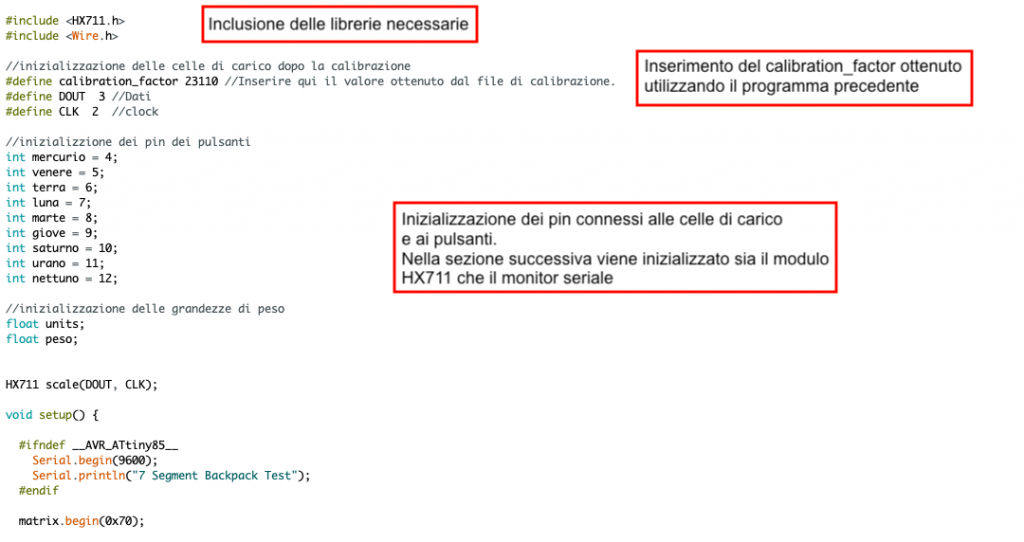
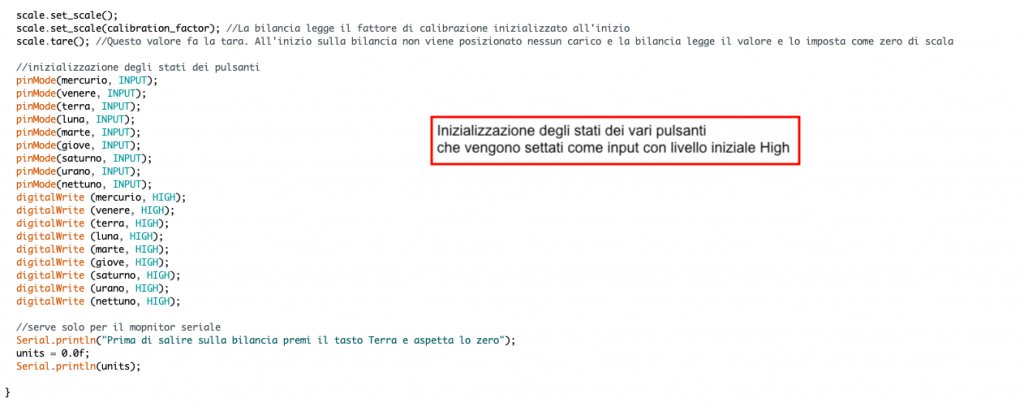
Verbindungen zwischen Knöpfen und Arduino: Merkur Knopf —> pin 4; Venus Knopf —> pin 5; Erde Knopf —> pin 6; Mond Knopf —> pin 7; Mars Knopf —> pin 8; Jupiter Knopf —> pin 9; Saturn Knopf —> pin 10; Uran Knopf —> pin 11; Neptun Knopf —> pin 12. N.B. In dieser Aktivität entschieden wir uns die Knöpfe so zu verbinden. Die Bestellung kann jedoch verändert werden, unter der Voraussetzung, dass auch der Basiscode geändert wird. Alle Hardware Anschlüsse ertellen, gehen wir nun zur Karteikarte-Programmierung über. Erstens, schliessen wir die Arduino-Karte mit dem passenden Kabel an unseren PC an, wo wir vorher die Software installiert haben, zum Überprüfen und Programmieren der Arduino-Karte. Nachdem wir Arduinos IDE geöffnet haben, gehen wir zum Instrumente/Karte und wählen wir Arduino/Genuino Uno und dann gehen wir in Instrumente/Anschluss und wählen wir den Anschluss, an dem unser Arduino ngeschlossen ist. So haben wir die Arduino-Arbeitsumgebung vorbereitet, und können anfangen, den Code für unsere Waage zu schreiben.
 |
 |
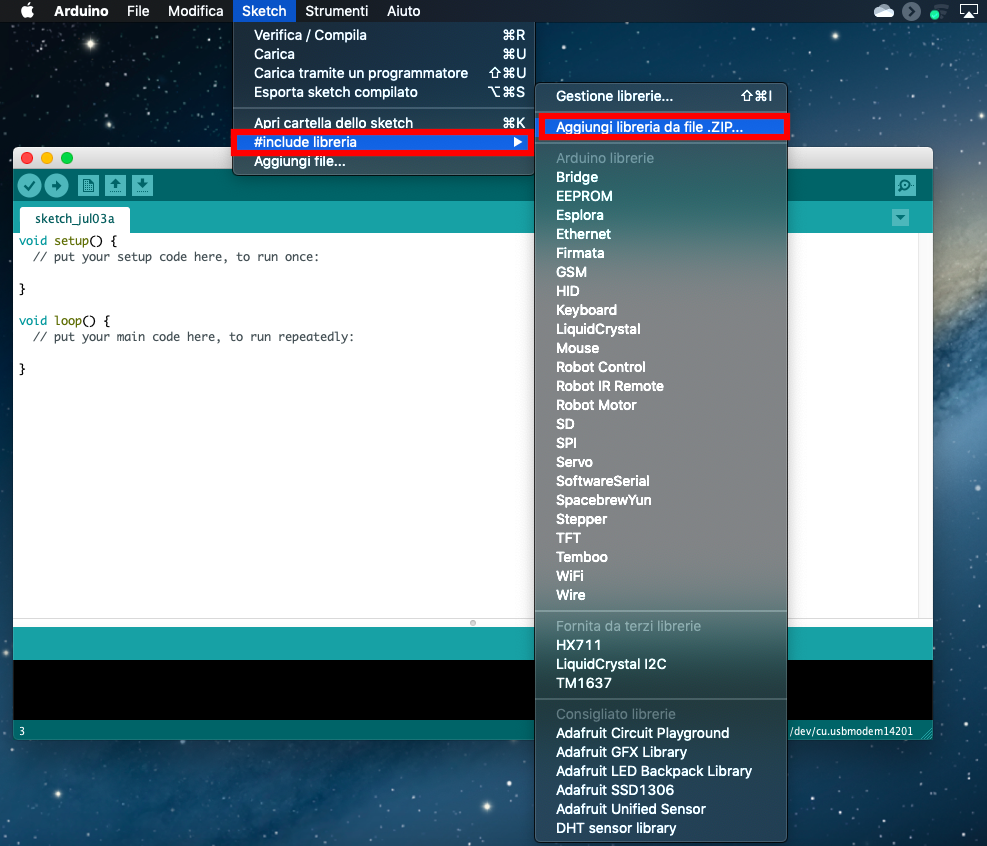
Jetzt müssen wir die Bibliothek aufladen, die es Arduino ermöglicht, die vom Modul HX711 erhaltenen Daten korrekt zu interpretieren. Sie können die Bibliothek hier herunterladen. Um die Bibliothek in Arduinos Umgebung zu importieren, klicken Sie einfach auf Sketch/# Bibliothek einschliessen/von Zip Datei hinzufügen; hier können Sie die gerade heruntergeladene Zip Datei suchen, und darüber klicken. Auf diese weise wird Arduino die entsprechende Bibliothek in das Programm aufnehmen.
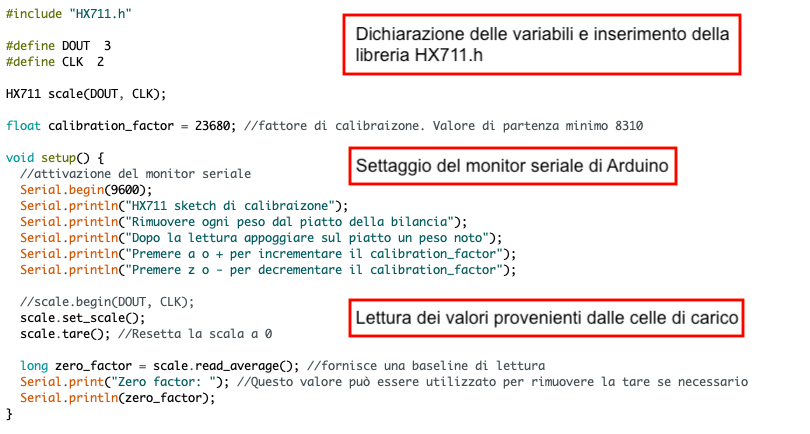
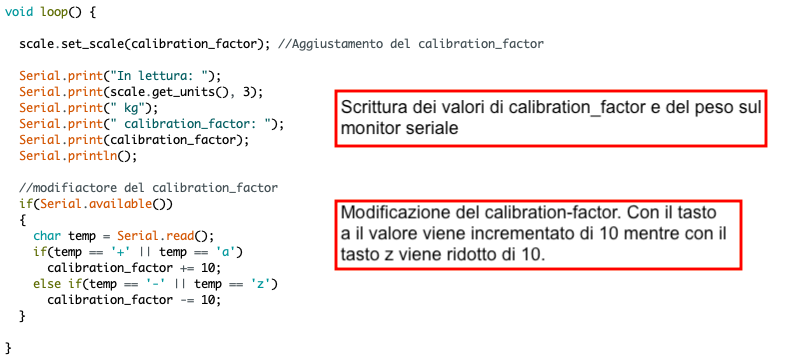
Nach diesen vorherigen Vorgängen, machen wir uns bereit, die Waage zu kalibrieren. Diese Operation ist von grundlegender Bedeutung, weil Frachtzellen – für Konstruktionsmerkmale und Betriebsarte – auch erhebliche Unterschiede aufweisen. Daher ist das Ergebnis einer Wägung durch einen Skalenendwert zu berichtigen, der in das allgemeine Waagenprogramm aufzunehmen ist. Für die Bestimmung des Skalenwerts, ist es von grundlegender Bedeutung, ein Kalibrierprogramm und einen Probegewicht von bekanntem Wert zu benutzen. Dazu benutzen wir das Programm, das von hier heruntergeladen werden kann. Als erstes, öffnen wir den Kalibriersketch in Arduinos IDE (Datei/öffnen, dann wählen wir die Datei Kalibrierung.ino aus) und laden wir sie auf die Karte, ohne Gewicht auf der Waagschale zu legen. Öffnen wir Arduinos Serienmonitor (um das zu tun, klicken Sie einfach auf das Lupen-Symbol, das oben rechts in Arduinos Arbeitsumgebung liegt). Wenn auf der Abbildung der erste Wert steht, legen wir einen Objekt mit bekanntem Gewicht auf die Waagschale. Auf dem Serienmonitor beginnt eine Reihe von Werten zu laufen, die das Gewicht von den Kraftmessdosen gemessenen Objekts darstellen. Diese Werte werden natürlich nicht das reale Gewicht darstellen; aber, mit den Tasten “a” und “z”, können wir den calibration_factor (Kalibrierungsfaktor) ändern, bis das Gewicht, das wir ablesen, dem Gewicht unseres Musterobjekts entspricht. Sobald wir das tatsächliche Gewicht des Objekts haben, nehmen wir den calibration_factor zur Kenntnis, der in das endgültige Waagenprogramm einfließen soll. Achtung: der calibration_factor kann positiv oder negativ sein.
Finden wir den calibration_factor un laden wir in Arduinos IDE den Sketch bilancia.ino; damit die Waage einwandfrei funktioniert. Bevor wir die Software ausführen und sie auf die Arduinos Karte laden, müssen wir den Wert der voreingestellten calibration_factor im Code ändern, und geben wir den Wert ein, de mit dem vorherigen Programm erreicht haben. Nun laden wir das Programm auf die Arduino-Karte, das von hier heruntergeladen werden kann, und öffnen wir den Serienmonitor.
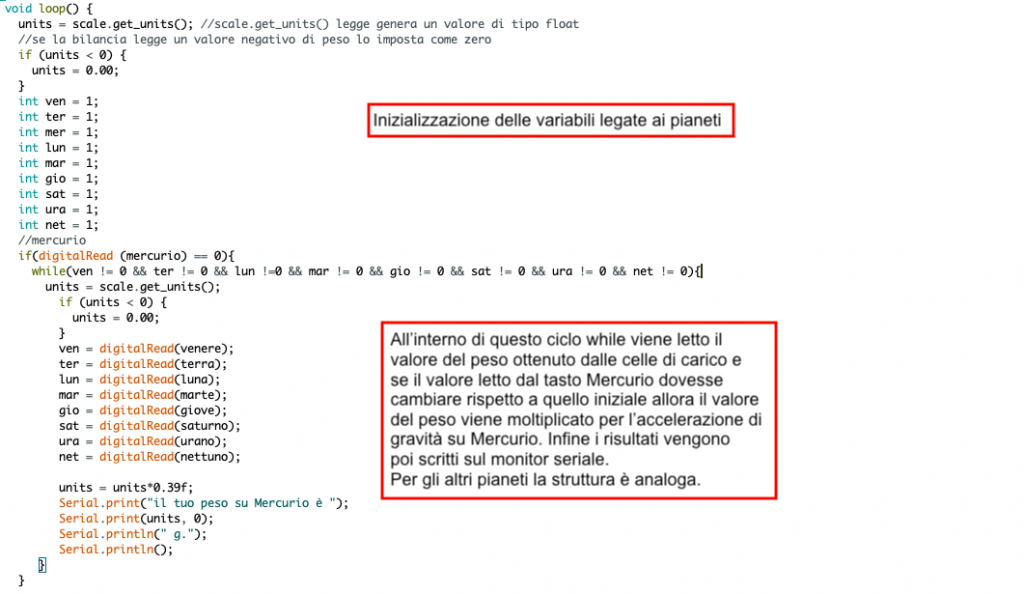
Jetzt müssen wir nur noch die Waage hochziehen. Mit einem Klick auf die verschiedenen Knöpfe, können wir auf dem Serienmonitor den Wert unseres Gewichts auf den Planeten des Sonnensystems ablesen! Diesen Link zu Webinar zum Thema Aktivität, anlässlich von Europe Code Week 2020: https://www.youtube.com/watch?v=Nhv3hQjlbRI&t=326s