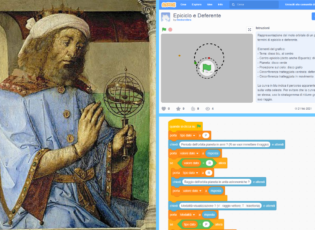
Moto planetario secondo il modello Tolemaico
2021-02-20
Già nell’antichità era noto che, a differenza del Sole e della Luna, i pianeti descrivono moti complicati rispetto alle stelle sulla volta celeste (non a caso la parola pianeta, dal greco, significa “errante”). Addirittura, la loro direzione di moto sembra invertirsi, per un certo periodo di tempo, per poi ristabilire la propria direzione (moto retrogrado apparente). I modelli geocentrici, la cui massima espressione sarà il modello Tolemaico, per questo hanno dovuto introdurre varie correzioni all’idea originaria che i pianeti orbitassero semplicemente lungo traiettorie circolari di cui la posizione della TerraLEGGI TUTTO